Mini Cube Robot Contains Basic Robot Functions in a Small, Inexpensive Form
from hackster.io
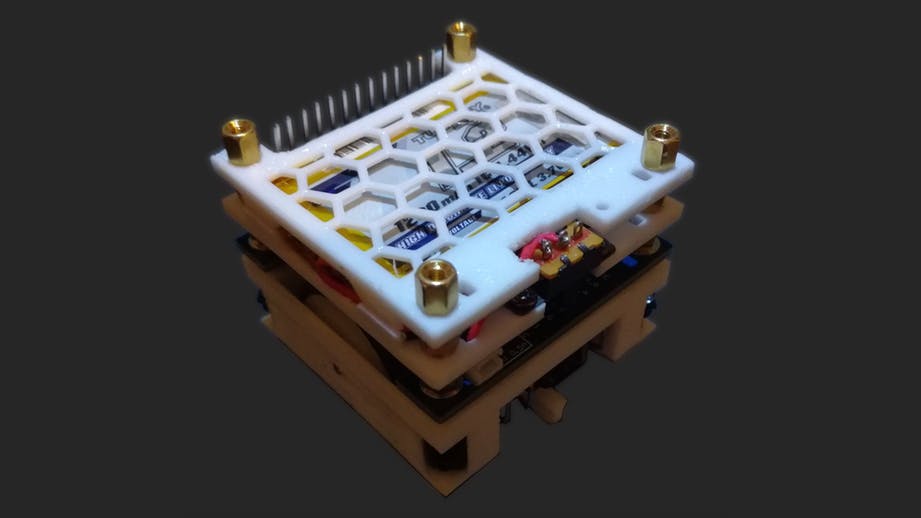
The Mini Cube Robot, a 5x5cm differential drive robot, is designed to be as simple, small, and cheap as possible while still including all the basic features. The size is dictated by what is needed to accommodate the motors, two M10 brushed motors.
The base design also includes six IR reflective sensors for contactless collision sensing — this plus the motors make up the bare minimum for a functional wheeled robot. Being so small and inexpensive, however, makes them ideal for cooperative systems and swarm robotics.
Additional features, including a main control and communication board, a sensor board, and a dedicated processing board, are added by stacking modules or PCBs on top.Step-by-step instructions for assembling the base are available via in NotBlackMagic's project's page, along with schematics and specs for the motor driver board, collision sensor board, motor encoder board, frame, and power supply.
The chassis of the robot is 3D-printed with .STL files that are readily available and all other parts are easily ordered online. The core of the motor driver board is the STM32F103, which controls the dual H-bridge motor driver STSPIN240 and acquires signals from the collision sensors and motor encoder board.
The Mini Cube Robot uses a 14-pin 2.56mm header as the backbone connector shared by all modules, though additional headers can be included on other boards to allow for expansion. However, this header is what enables the control communications and must be available to all modules/boards.
While the BOM, schematics, and relevant files are all available for anyone to build their own version of the bot, this project is still a work in progress. The current version relies on a few special modifications and assembly of both the encoder and collision sensor boards which are not ideal, as well as the fact that both are soldered to the motor driver board.In this first version of the base and PCBs, for instance, the base needs to be modified so the sensor board can actually fit in place. As tweaks happen, the project will be updated, though its current version is available as a starting point for anyone interested in the bot.


Leave a comment