This Could Come in Handy - MIT Robotics
from hackster.io
Even the simplest and most mundane aspects of our daily lives are enough to leave a perfectly good robot utterly confused. Consider the task of picking up a screwdriver from a table, then shifting your grasp position such that it is oriented properly to be used as a tool. A piece of cake, right? For most of us it is, but teaching a robot how to reorient arbitrary objects within its grip is a very challenging problem that many researchers are working to solve.
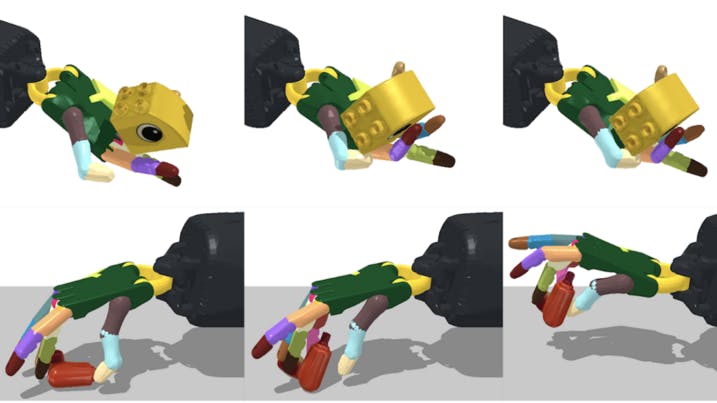
A team at MIT’s Computer Science and Artificial Intelligence Laboratory have taken a new approach in developing a robotics framework that can reorient a wide range of objects — even previously unseen objects. The method works whether the robotic hand is facing upwards or downwards, and has been proven on over 2,000 different objects to date.
When the researchers first approached the problem, they suspected that the incorporation of visual and depth information would be critical to the success of their efforts. Surprisingly, they found that this was not the case. It turned out that a large number of unseen objects could be successfully manipulated with no access to information about their shape. They relied instead on data related to fingertip position and object velocity.To develop the method, a simulated environment with a human-like hand with 24 degrees of freedom was first created. Within this environment, a model-free reinforcement learning algorithm was trained via a “teacher-student” training method based on data from interactions with many simulated objects. They also incorporated a “gravity curriculum” into the training process, in which the algorithm first learns to work in a zero-gravity environment, then slowly adapts to normal gravity conditions. This gravity training was essential for the hand to be able to operate when facing downwards — objects would simply be dropped in this scenario with no awareness of gravity.
When manipulating small, circular objects (e.g. apples, marbles), the framework often had success rates very near to 100 percent. As the complexity of the object increased (e.g. screwdriver, scissors), reorientation accuracy decreased to a rate nearer to 30 percent.
The team showed that a model-free reinforcement learning approach can train robots to successfully reorient a wide range of object types and sizes. Thus far, work has only been done in simulation, however, the researchers believe that the work is directly transferable to the real world. As previously mentioned, reorientation success rate varies substantially with the shape of the object. Accordingly, the team plans to develop a training curriculum based on object shapes, which they believe may significantly improve overall performance of the technique.

Leave a comment