No-Contact, Wireless Charging Aerial Insect Bot Created by Toyota R&D Labs
from hackster.io
While insect-scale aerial vehicles are useful for quite a number of applications, their flight durations and so their utility has been limited by a lack of lightweight, high power density batteries. A solution developed by Toyota Central R&D Labs allows micro aerial vehicles (MAVs) to fly untethered — powered by wireless radio frequency technology.
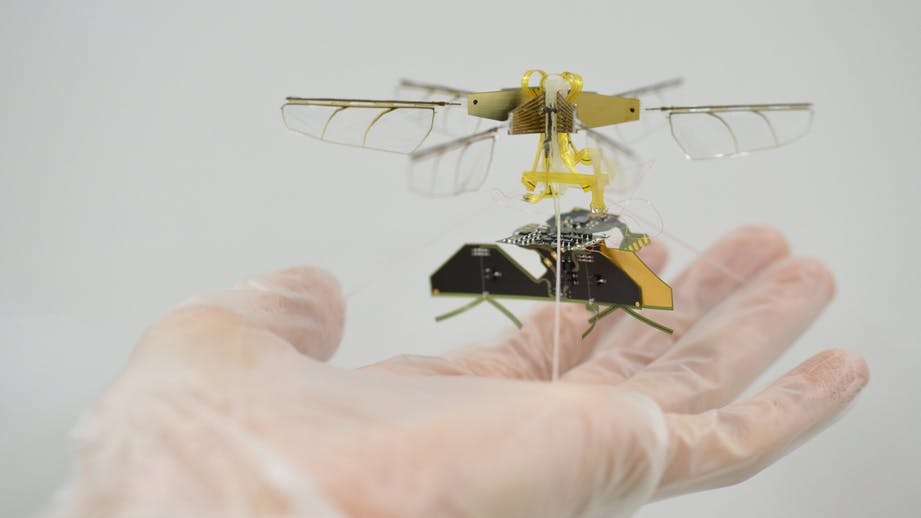
Especially with increasing risk mitigation restrictions on drone flight, smaller and lighter MAVs are in increasing demand. Smaller and lighter means less collision energy should a vehicle fail while in flight, making insect-scale vehicles exponentially safer for use in applications ranging from communication to environmental sensing to surveying.Toyota R&D’s bot weighs just 1.8g, making it the lightest aircraft with a high-frequency engine currently available — in fact, it is over 25 times lighter than previously developed radio-powered micro-scale aerial vehicles.
The aerial insect bot consists of an oscillating piezoelectric actuator which is powered by a 5 GHz dipole antenna. The powerful monocrystalline piezoelectric material of the actuator, along with an arrangement of two wings facing one another, creates highly efficient flapping, providing a power-to-weight ratio comparable to live insects.
A radio frequency receiver with a power density higher than that of a standard LiPo battery of the same mass greatly improves efficiency and operating time, as the sub-gram circuit can receive more than 1 W of power at a distance via the RF wave.
Their current design has demonstrated an ability to take off smoothly with no battery and no wires connected to it in a series of tests. The next step is combining the power supply technology with altitude control so the bot can hover and maneuver freely.The research team believes that a fully-functional untethered MAV of insect-scale mass is possible by optimizing their current design and including additional features such as integrating a flight controller system and using a beam-focusing system for the power transmitter.


Leave a comment