An Arduino-powered micro quadruped that fits in the palm of your hand
from arduino.cc
Arduino-powered quadruped robots are quite common projects for hobbyists to build once they are a bit more comfortable with embedded systems.
One problem with many of the pre-designed quadruped platforms is that they require a lot of time to assemble owing to their large size.
This is what inspired Technovation to come up with their own micro quadruped robot, which requires only a fraction of the normal amount of material and hours to construct.
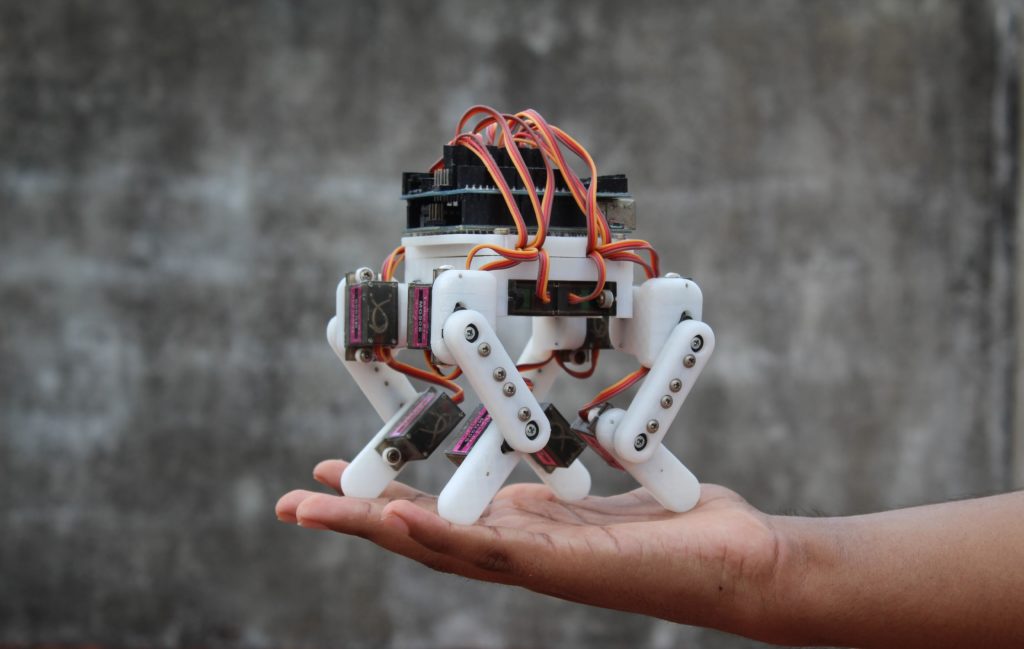
The robot is based around a central chassis that houses the Arduino Uno and sensor shield components, which provide power and signaling to the motors.Underneath this hardware stack are four servos that can rotate to the side and act as hip joints. Lastly, each leg is comprised of two servos to allow for forward motion.
In order for the Arduino to translate a desired direction into discrete positions for the servo motors, Technovation had to implement a few kinematic equations within the robot’s firmware.
These consist of movement functions, which create gaits by specifying where and when each leg should move. Several parameters, including speed, leg length, and even the motion paths themselves, have the ability to be fine-tuned or expanded to add more capabilities.
You can see how this micro quadruped works in its demonstration video here or you can read more about the project in Technovation’s Instructables write-up.


Leave a comment